[Southeast University’s News Network, Oct. 8]: (correspondent: Zuo Bo) Recently, Prof. Yang Hong’s research team from the School of Chemistry and Chemical Engineering of Southeast University has achieved important progress in the research field of light-controlled soft robot. The scientific research team reported a modulation strategy that utilizes the visible light and the three optical bands of infrared light to control the movement direction of soft robots. The research result was published in “Nature Communications”, the international top journal.
The light-controlled soft robot is a hotspot in the field of intelligent bionic robot research. However, how to realize the convenient regulation and control of the movement direction of soft robot is a key scientific issue to be solved urgently in this field. The traditional approach of regulation and control by light stimulation has to concentrate the beam on a specific local area of the soft robot, or illuminate the soft robot from an angle or direction to cause local deformation differences, thereby pushing the soft robot to move towards a certain direction. For example, as often seen in the literature, illuminate the soft robot’s head to enable it retreated; illuminate the tail to enable it to advance; scan the soft robot from left to right in order to turn right and scan the soft robot from right to left in order to turn left. Such regulation method by light stimulation lacked convenience and is very inconvenient.
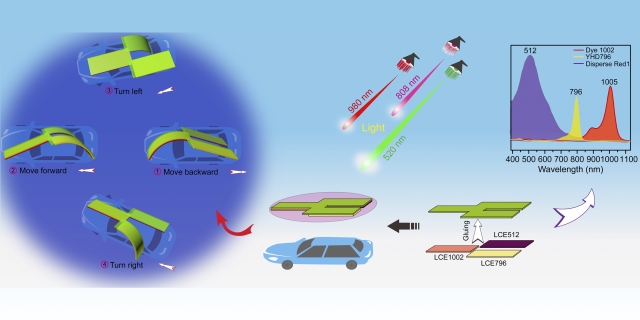
The research team of Southeast University has adopted a different approach and constructed a multi-layered liquid crystal elastomer-based soft robot. Three organic photothermal conversion reagents responding to the optical bands of 520nm, 808nm and 980nm respectively, which would not interfere with each other, were added at different structural layers. Thereby, the on/off switch of the visible and three-band infrared light can be utilized to control the movement direction of the softw robot. Compared with the traditional regulation by light stimulation, this method realizes the overall deformation difference based on the selective absorption of light stimulation in different regions of the software robot, and then pushes the movement of the soft robot. Therefore, the illumination position, direction, angle and other factors of the light source will not exert fundamental impacts on the movement direction. This strategy has provided a new viewpoint regarding the convenient regulation and control of the movement direction of soft robots. The first author of the thesis is Zuo Bo, a Ph.D. candidate enrolled in 2016.
Submitted by: School of Chemistry and Chemical Engineering
(Editor-in-charge: Ji Hong, reviewed by: Song Yechun)